Traffic Flow Operations
Empirical Analysis, Statistical Inference, and Modeling
Traffic flow operations study how movement emerges from interaction, between vehicles, pedestrians, infrastructure, control rules, and human decision-making, under conditions that are inherently noisy, heterogeneous, and only partially observable. Across motorway corridors, weaving sections, and unsignalized urban crossings, my work approaches traffic flow as a complex dynamical system, where macroscopic patterns such as congestion, instability, and capacity loss arise from microscopic decisions like lane changes, gap acceptance, and speed adaptation. Understanding these systems requires more than descriptive analytics: it demands the reconstruction of latent states, the modelling of interaction mechanisms, and the quantification of uncertainty across space and time.
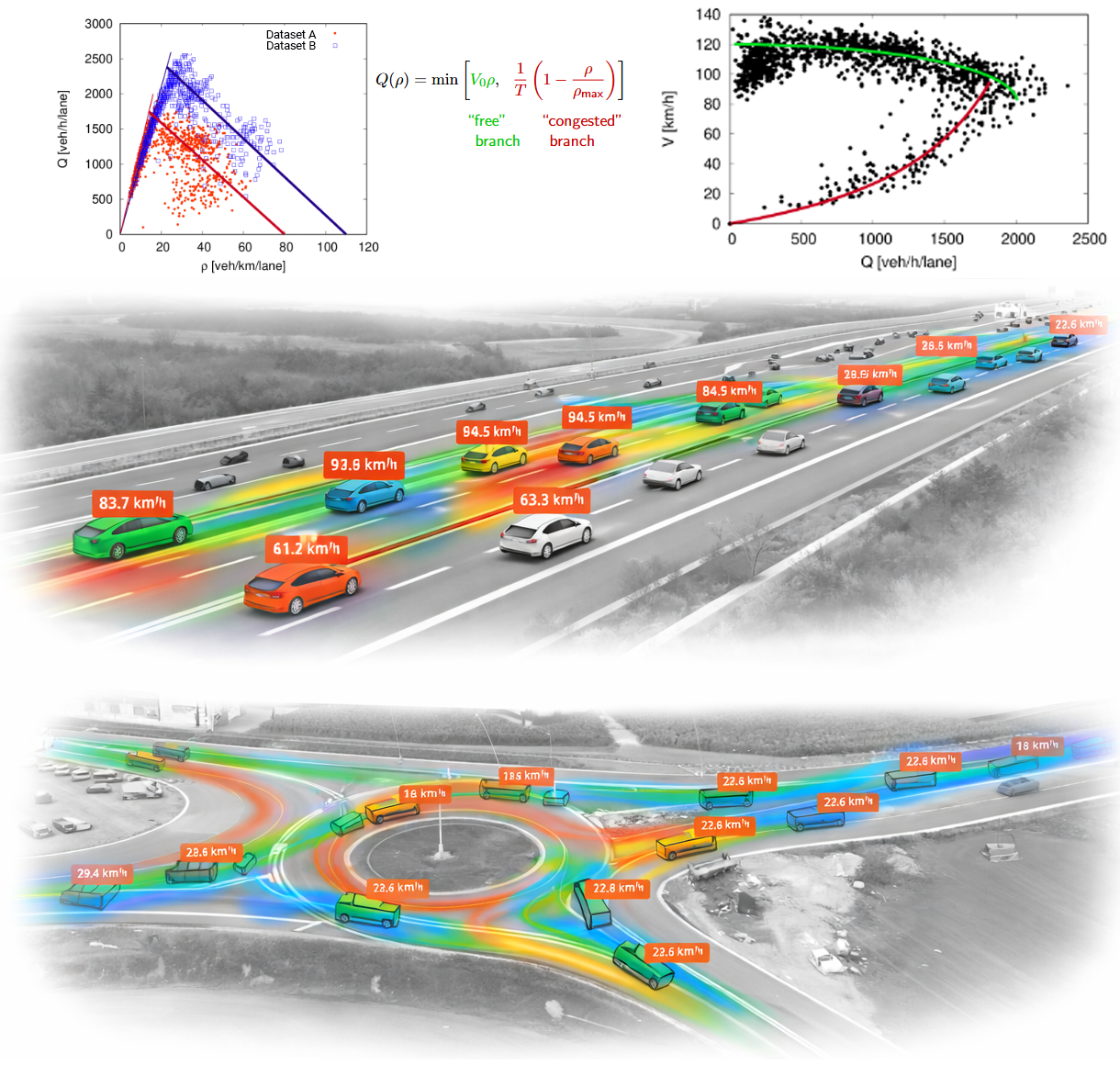
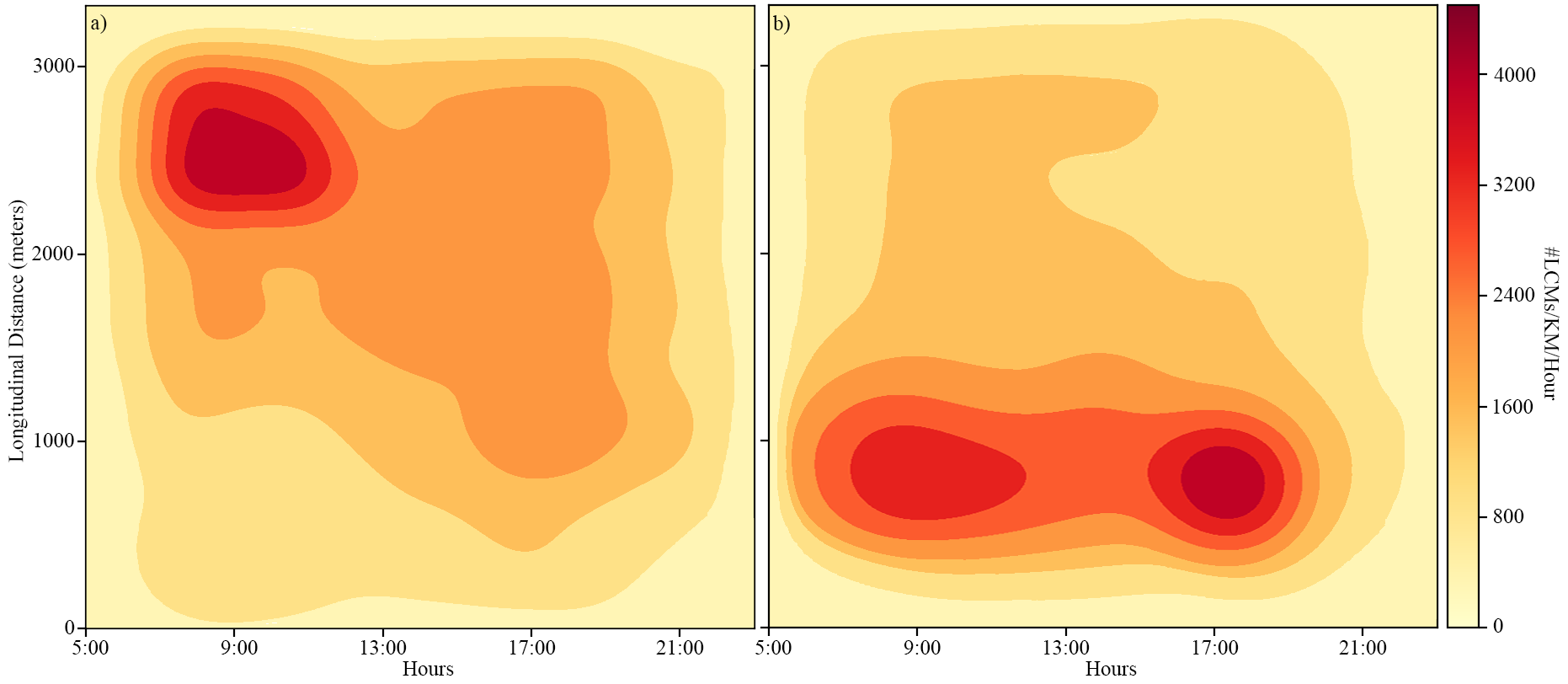
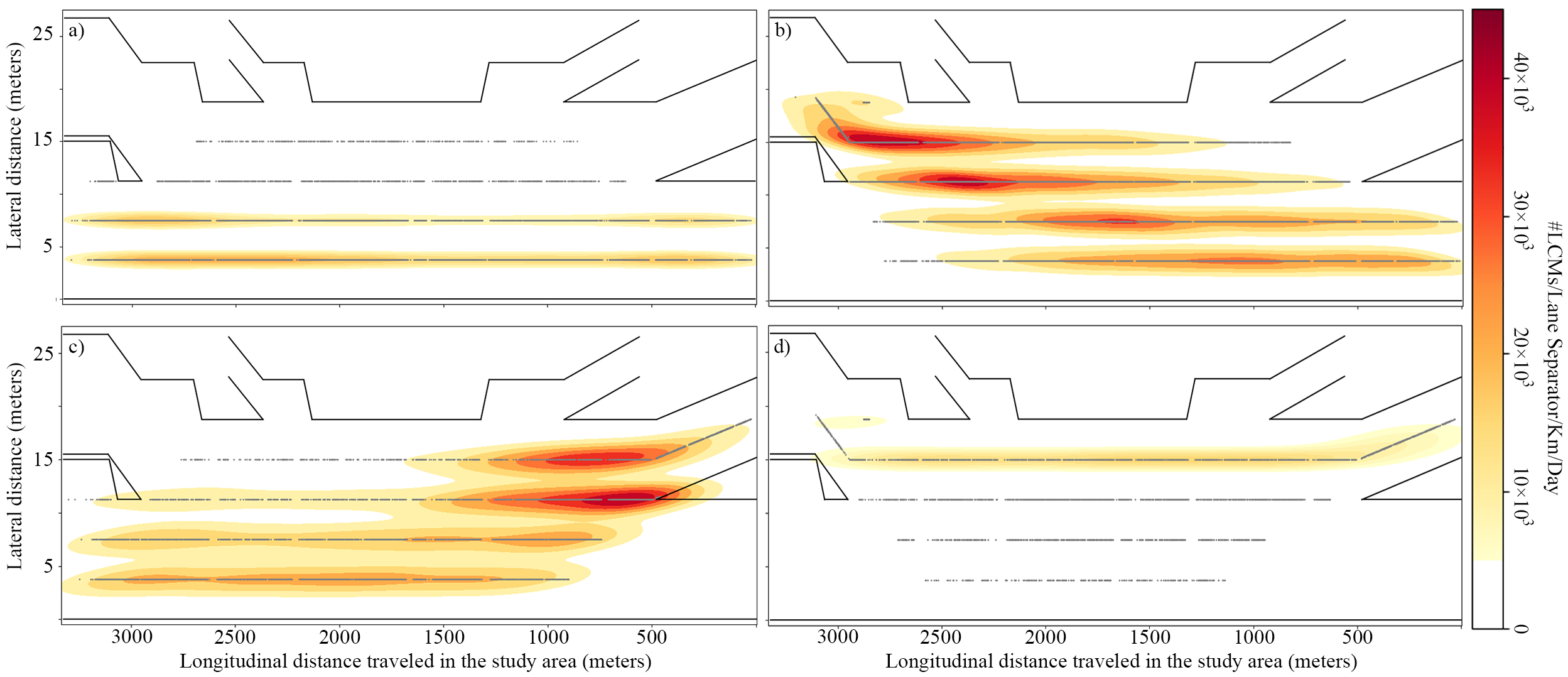
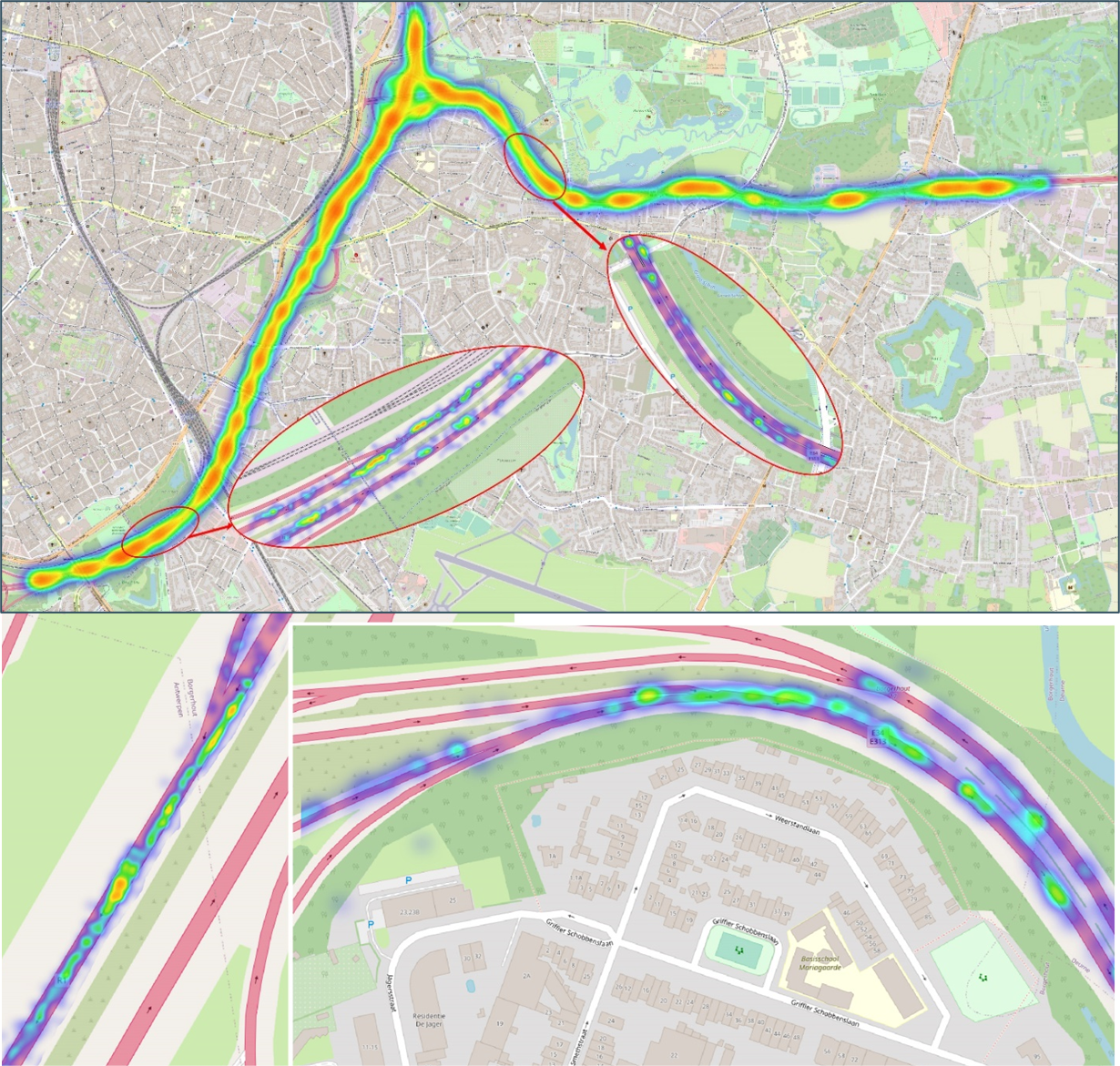
A central theme of my projects related to traffic flow operation is the translation of raw, imperfect observations into operationally meaningful system states. Using high-resolution loop-detector data, video observations, and reconstructed trajectories, I developed and calibrated advanced spatiotemporal estimation frameworks to infer travel times, speed fields, and congestion patterns at a resolution suitable for individual-level analysis. This includes adapting and optimizing filtering techniques under different traffic regimes, integrating optimization algorithms where classical assumptions fail, and validating models against independent ground truth. These methods enable lane-level, regime-aware inference in environments dominated by stochasticity, nonlinear dynamics, and strong interdependencies, conditions common to many real-world systems beyond mobility.
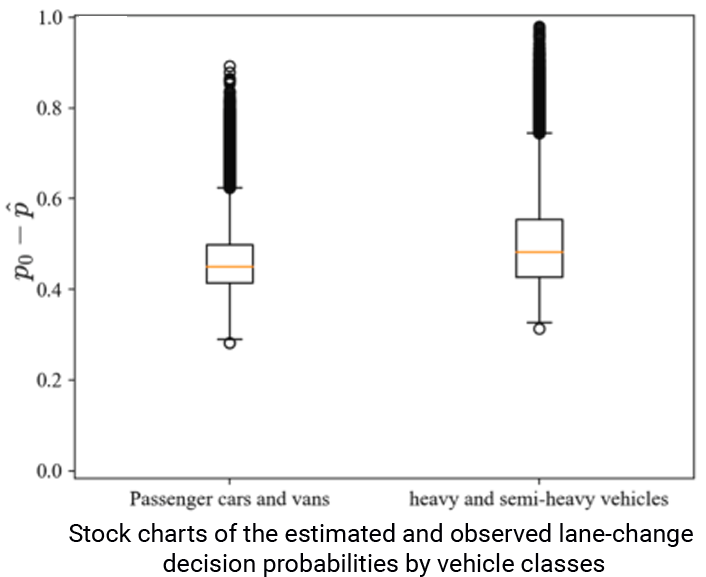
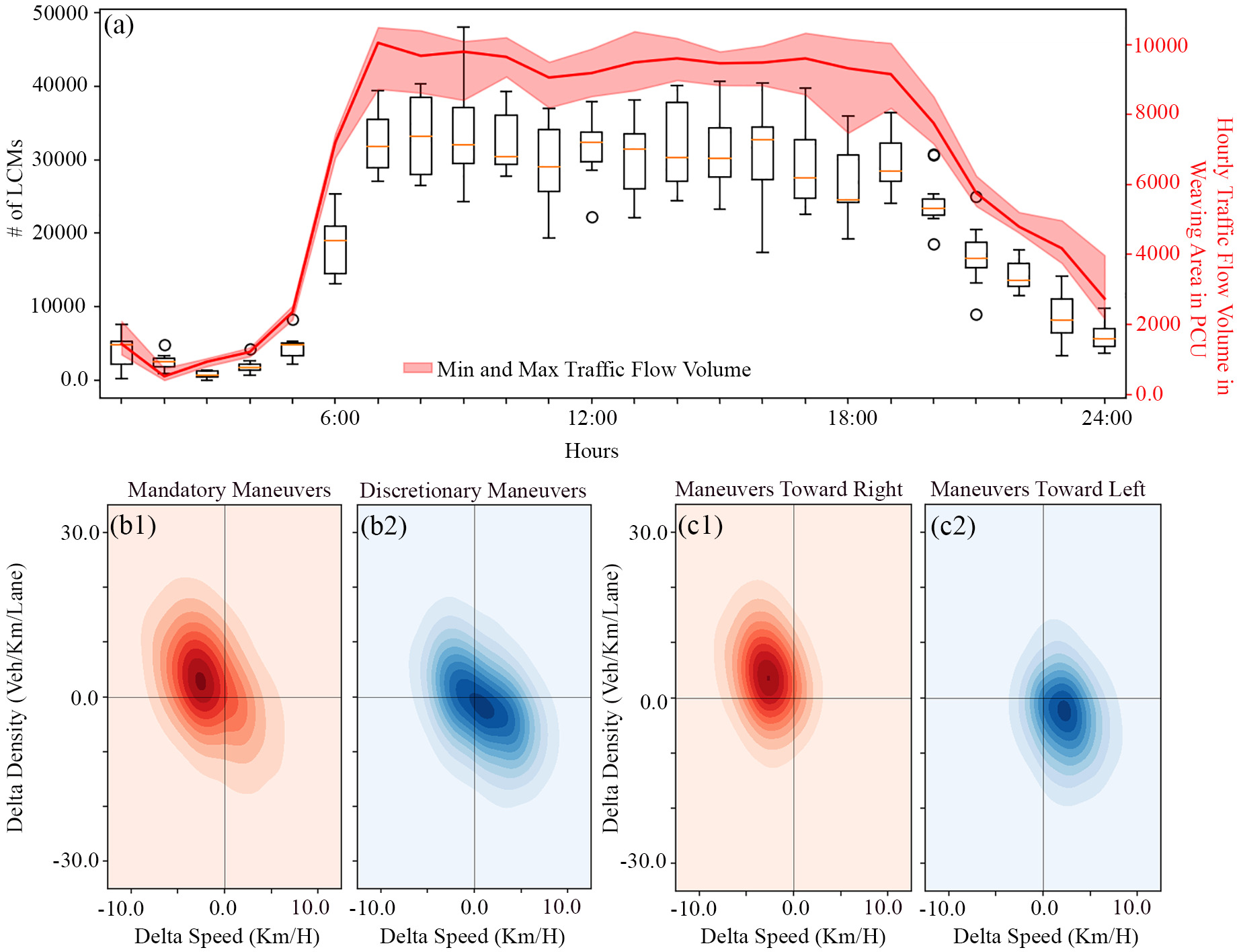
Equally important is the explicit modelling of behavior and interaction. My work spans the analysis of interactions between motorized and non-motorized modes, captured through hybrid statistical models that combine latent variables and structural equation modelling, to motorway traffic, where lane changes act as high-impact, system-level perturbations. By analyzing how local maneuvers propagate through the network, my projects reveal how individual incentives, constraints, and heterogeneity shape collective outcomes. The methodological backbone blends advanced statistics, optimization, and behavioral modeling, ensuring interpretability while preserving realism.
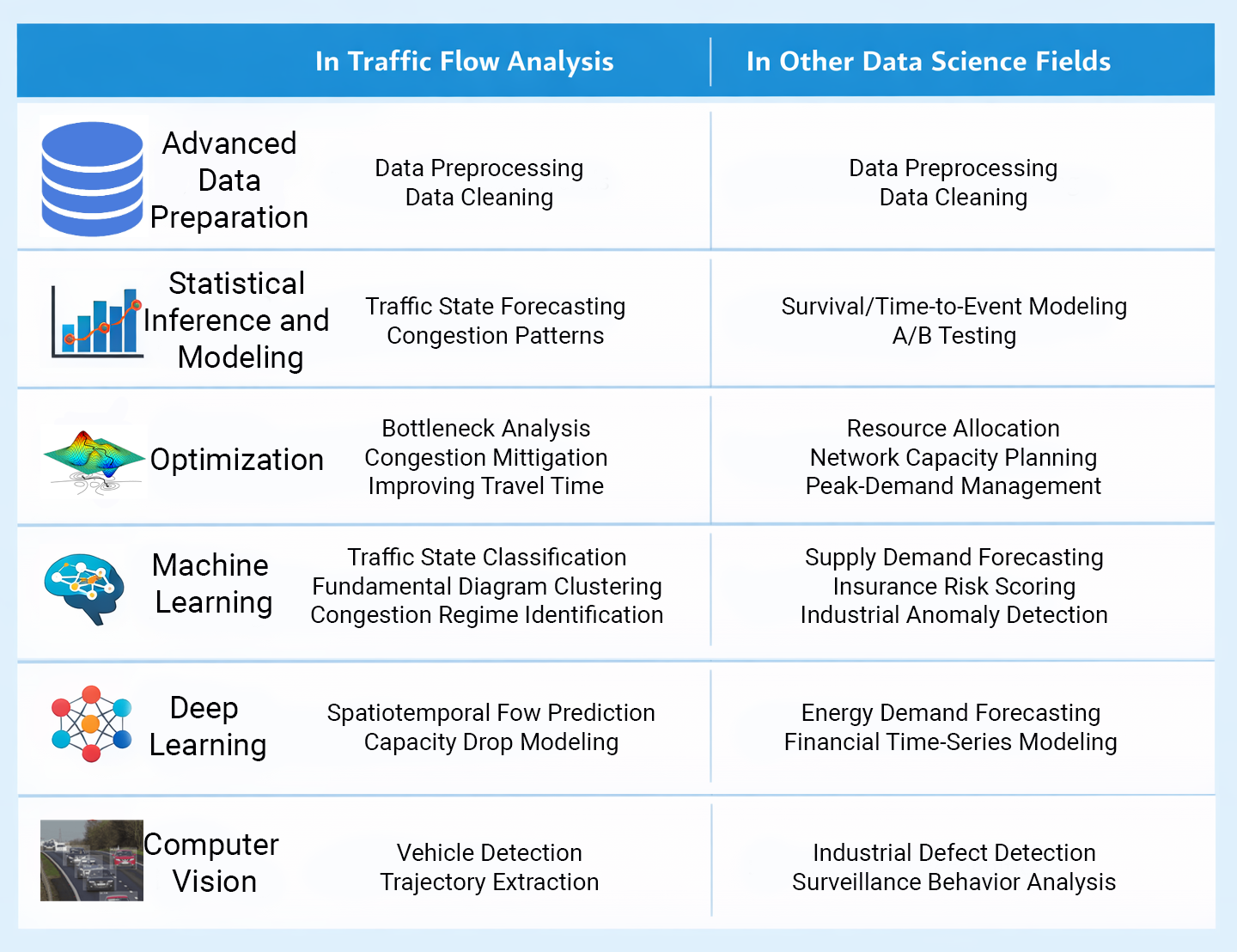
Beyond mobility and transportation, these projects demonstrate a transferable skill set for data-intensive, high-dimensional systems where signals are sparse, uncertainty is structural, and decisions interact across scales. The same techniques: state estimation, optimization under constraints, regime-dependent modelling, behavioral inference, and robust validation, apply directly to domains such as industrial operations, financial markets, human-AI systems, safety-critical analytics, and large-scale decision support. Traffic flow operations, in this sense, serve not merely as an application domain but as a laboratory for developing data-science methodologies that explain, predict, and ultimately shape complex systems under real-world uncertainty.